Key Projects
Mark-I | Autonomous Curling Robot, Mechatronics Tournament Semifinalist
ME 210, Stanford University
Mark-I, inspired by the first prototype of the suit Tony Stark built in the cave, was an autonomous curling bot. It was referred to as "the Tank" by fellow teams because of its ability to speed up and maneuver super fast!
The entire robot was built from scratch, from material sourcing and mechanical design to electrical circuiting and the autonomous layer. We finished as semifinalists in a tournament with 20 teams.
Mark 1 Autonomous Curling Bot
Vision Based Pick and Place Manipulation with a UR5 Robot
Robot Perception, Prof. Shuran Song
Under the guidance of Prof. Shuran Song (Robotics and Embodied AI Lab), I developed a vision based pick-and-place system on a UR5 robot. The work included building an end to end manipulation pipeline in PyBullet with RGB-D sensing and TSDF-based 3D reconstruction for scene understanding.
I trained a U-Net for instance segmentation and used the predicted masks to extract object point clouds and estimate full 6-DoF poses using ICP in SE(3). Building on this perception stack, I implemented a learning-based, action-affordance grasping strategy for unseen objects.
Pick and Place using UR5 in PyBullet
Drone Swarm Challenge
Inter-IIT Tech Meet 2023, IIT Kanpur
We transformed an existing ROS-based architecture into a platform-independent and user-friendly Python API to control the drones and perform swarming. Having designed a post-flight analytics dashboard to assess and tune the algorithm using React.js and Plotly, we achieved stable hovering and vision-guided rectangular motion of drones by implementing a multi-axis PID controller.

Stable hovering with a multi-axis PID Controller
RL Games Hackathon
National Champions, Shaastra 2022
We created bots using reinforcement learning to compete with other bots in a virtual two-player 2D game setting. With a novel feature engineering technique inspired by the decision tree algorithm, we implemented two Deep RL algorithms namely DQN and Policy Gradient based. In the video, our agent is A (the blue snake) vs and opponent in the tournament.
Our RL agent (A - Blue) vs Opponent agent (B - Red)
Mission Planner for Autonomous Robots
Introduction to Robotics, KTH
In this project, I implemented a mission planner on the TIAGo Robot using behaviour trees that achieves autonomous navigation and manipulation based on high level instructions like "Go to Table A, grab the cube and place it on Table B".
For the low level tasks, I implemented an Inverse Kinematics solution for the robotic arm using its Denavit-Hartenberg parameterization, Particle Swarm Optimisation for pose estimation and RRT* for navigation.
The Tiago robot autonomously performs a Pick and Place task
Flipkart Grid Robotics Challenge
We implemented a central monitoring/navigation system aimed to control robots in a warehouse. Using OpenCV to understand the arena and estimate the position and orientation of the robot, we developed a central navigation system to instruct the robot on go to the desired location and drop the packages.
A CV based centralised controller generating waypoints and velocity commands to the bot
Wells Fargo Quantitative AI Hackathon
3rd Place, Shaastra 2022
Secured 3rd place out of 500+ teams registered across the country in the national-level quantitative AI hackathon in which we forecasted the implied volatility surface of options over 60 trading days using 2.5 years of past volatility surface data.
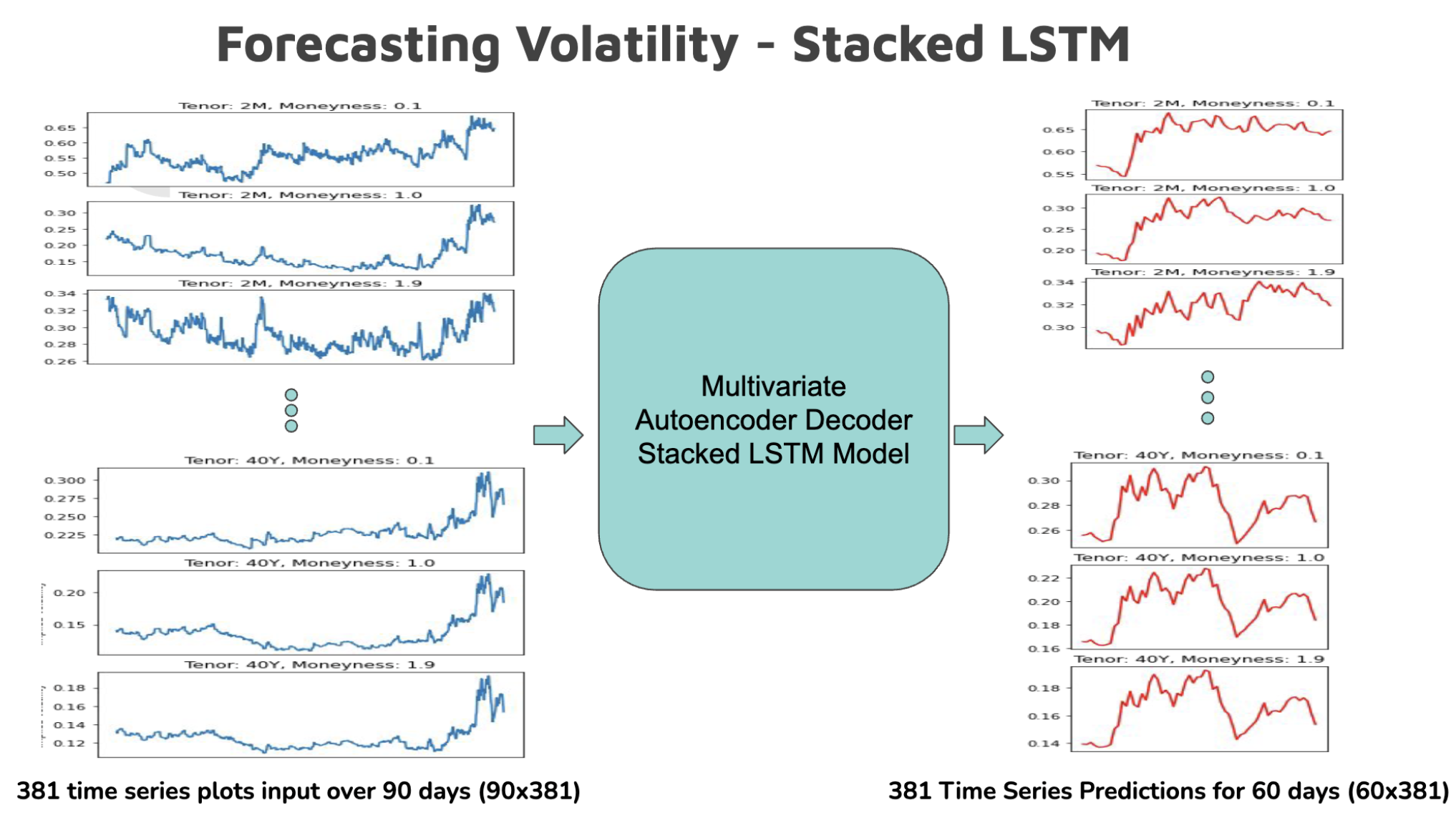
Network architecture used for predicting the volatility surface


